3.4. linear algebra#
3.4.1. linear basics#
3.4.1.1. notation#
\(x \preceq y\) - these are vectors and x is less than y elementwise
\(X \preceq Y\) - matrices, \(Y-X\) is PSD
\(v^TXv \leq v^TYv \:\: \forall v\)
3.4.1.2. linearity#
inner product \(<X, Y> = tr(X^TY) = \sum_i \sum_j X_{ij} Y_{ij}\)
like inner product if we collapsed into big vector
linear
symmetric
gives angle back
linear
superposition \(f(x+y) = f(x)+f(y) \)
proportionality \(f(k\cdot x) = k \cdot f(x)\)
bilinear just means a function is linear in 2 variables
vector space
closed under addition
contains identity
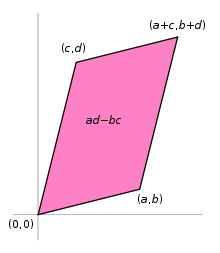
det - sum of products including one element from each row / column with correct sign
absolute value = area of parallelogram made by rows (or cols)
lin independent: \(c_1x_1+c_2x_2=0 \implies c_1=c_2=0\)
cauchy-schwartz inequality: \(|x^T y| \leq ||x||_2 ||y|||_2\)
implies triangle inequality: \(||x+y||^2 \leq (||x|| + ||y||)^2\)
3.4.1.3. matrix properties#
\(x^TAx = tr(xx^TA)\)
nonsingular = invertible = nonzero determinant = null space of zero
only square matrices
rank of mxn matrix- max number of linearly independent columns / rows
rank==m==n, then nonsingular
ill-conditioned matrix - matrix is close to being singular - very small determinant
inverse
orthogonal matrix: all columns are orthonormal
\(A^{-1} = A^T\)
preserves the Euclidean norm \(||Ax||_2 = ||x||_2\)
if diagonal, inverse is invert all elements
inverting 3x3 - transpose, find all mini dets, multiply by signs, divide by det
psuedo-inverse = Moore-Penrose inverse \(A^\dagger = (A^T A)^{-1} A^T\)
if A is nonsingular, \(A^\dagger = A^{-1}\)
if rank(A) = m, then must invert using \(A A^T\)
if rank(A) = n, then must use \(A^T A\)
inversion of matrix is \(\approx O(n^3)\)
inverse of psd symmetric matrix is also psd and symmetric
if A, B invertible \((AB)^{-1} = B^{-1} A^{-1}\)
orthogonal complement - set of orthogonal vectors
define R(A) to be range space of A (column space) and N(A) to be null space of A
R(A) and N(A) are orthogonal complements
dim \(R(A)\) = r
dim \(N(A)\) = n-r
dim \(R(A^T)\) = r
dim \(N(A^T)\) = m-r
adjoint - compute with mini-dets
\(A^{-1} = adj(A) / \det(A)\)
Schur complement of \(X = \begin{bmatrix} A & B \\ C & D\end{bmatrix}\)
\(M/D = A - BD^{-1}C\)
\(M/A = D-CA^{-1}B\)
\(X \succeq 0 \iff M/D \succeq 0\)
3.4.2. matrix calc#
overview: imagine derivative \(f(x + \Delta)\)
function f: \(\text{anything} \to \mathbb{R}^m\)
gradient vector \(\nabla_A f(\mathbf{A})\)- partial derivatives with respect to each element of A (vector or matrix)
gradient = \(\frac{\partial f}{\partial A}^T\)
these next 2 assume numerator layout (numerator-major order, so numerator constant along rows)
function f: \(\mathbb{R}^n \to \mathbb{R}^m\)
Jacobian matrix: $\(\mathbf J = \begin{bmatrix} \dfrac{\partial \mathbf{f}}{\partial x_1} & \cdots & \dfrac{\partial \mathbf{f}}{\partial x_n} \end{bmatrix}= \begin{bmatrix} \dfrac{\partial f_1}{\partial x_1} & \cdots & \dfrac{\partial f_1}{\partial x_n}\\ \vdots & \ddots & \vdots\\ \dfrac{\partial f_m}{\partial x_1} & \cdots & \dfrac{\partial f_m}{\partial x_n} \end{bmatrix}\)$ - this is dim(f) x dim(x)
function f: \(\mathbb{R}^n \to \mathbb{R}\)
2nd derivative is Hessian matrix
\(\bold H = \nabla^2 f(x)_{ij} = \frac{\partial^2 f(x)}{\partial x_i \partial x_j} = \begin{bmatrix} \dfrac{\partial^2 f}{\partial x_1^2} & \dfrac{\partial^2 f}{\partial x_1\,\partial x_2} & \cdots & \dfrac{\partial^2 f}{\partial x_1\,\partial x_n} \\[2.2ex] \dfrac{\partial^2 f}{\partial x_2\,\partial x_1} & \dfrac{\partial^2 f}{\partial x_2^2} & \cdots & \dfrac{\partial^2 f}{\partial x_2\,\partial x_n} \\[2.2ex] \vdots & \vdots & \ddots & \vdots \\[2.2ex] \dfrac{\partial^2 f}{\partial x_n\,\partial x_1} & \dfrac{\partial^2 f}{\partial x_n\,\partial x_2} & \cdots & \dfrac{\partial^2 f}{\partial x_n^2}\end{bmatrix}\)
examples
\(\nabla_x a^T x = a\)
\(\nabla_x x^TAx = 2Ax\) (if A symmetric, else \((A+A^T)x)\))
\(\nabla_x^2 x^TAx = 2A\) (if A symmetric, else \(A+A^T\))
\(\nabla_x \log \: \det X = X^{-1}\)
we can calculate derivs of quadratic forms by calculating derivs of traces
\(x^TAx = tr[x^TAx] = tr[xx^TA]\)
\(\implies \frac{\partial}{\partial A} x^TAx = \frac{\partial}{\partial A} tr[xx^TA] = [xx^T]^T = xx^T\)
useful result: \(\frac{\partial}{\partial A} log|A| = A^{-T}\)
3.4.3. norms#
def
nonnegative
definite f(x) = 0 iff x = 0
proportionality (also called homogenous)
triangle inequality
properties
convex
3.4.3.1. vector norms#
\(L_p-\)norms: \(||x||_p = (\sum_{i=1}^n |x_i|^p)^{1/p}\)
\(L_0\) norm - number of nonzero elements (this is not actually a norm!)
\(||x||_1 = \sum |x_i|\)
\(||x||_2\) - Euclidean norm
\(||x||_\infty = \max_i |x_i|\) - also called Cheybyshev norm
quadratic norms
P-quadratic norm: \(||x||_P = (x^TPx)^{1/2} = || P^{1/2} x ||_2\) where \(P \in S_{++}^n\)
dual norm
given a norm \(|| \cdot ||\), dual norm \(||z||_* = sup\{ z^Tx \: | \: ||x|| \leq 1\}\)
dual of the dual is the original
dual of Euclidean is just Euclidean
dual of \(l_1\) is \(l_\infty\)
dual of spectral norm is some of the singular values
3.4.3.2. matrix norms#
schatten p-norms: \(||X||_p = (\sum \sigma^p_i(A) )^{1/p}\) - note this is nice for organization but this p is never really mentioned
p=1: nuclear norm = trace norm: \(||X||_* = \sum_i \sigma_i\)
p=2: frobenius norm = euclidean norm: \(||X||_F^2 = \sqrt {\sum_{ij} X_{ij}^2} = \sqrt{\sum_i \sigma_i^2}\) - like vector \(L_2\) norm
p=\(\infty\): spectral norm = \(\mathbf{L_2}\)-norm (of a matrix) = \(||X||_2 = \sigma_\text{max}(X) \)
entrywise norms
sum-absolute-value norm (like vector \(l_1\))
maximum-absolute-value norm (like vector \(l_\infty\))
operator norm
let \(||\cdot||_a\) and \(|| \cdot ||_b\) be vector norms
operator norm \(||X||_{a,b} = sup\{ ||Xu||_a \: | \: ||u||_b \leq 1 \}\)
represents the maximum stretching that X does to a vector u
if using p-norms, can get Frobenius and some others
3.4.4. eigenstuff#
3.4.4.1. eigenvalues intro - strang 5.1#
elimination changes eigenvalues
eigenvector application to diff eqs \(\frac{du}{dt}=Au\)
soln is exponential: \(u(t) = c_1 e^{\lambda_1 t} x_1 + c_2 e^{\lambda_2 t} x_2\)
eigenvalue eqn: \(Ax = \lambda x \implies (A-\lambda I)x=0\)
\(det(A-\lambda I) = 0\) yields characteristic polynomial
eigenvalue properties
0 eigenvalue \(\implies\) A is singular
eigenvalues are on the main diagonal when the matrix is triangular
expressions when \(A \in \mathbb{S}\)
\(\det(A) = \prod_i \lambda_i\)
\(tr(A) = \sum_i \lambda_i\)
\(||A||_2 = \max | \lambda_i |\)
\(||A||_F = \sqrt{\sum \lambda_i^2}\)
\(\lambda_{max} (A) = \sup_{x \neq 0} \frac{x^T A x}{x^T x}\)
\(\lambda_{min} (A) = \inf_{x \neq 0} \frac{x^T A x}{x^T x}\)
defective matrices - lack a full set of eigenvalues
positive semi-definite: \(A \in R^{nxn}\)
basically these are always symmetric \(A=A^T\)
all eigenvalues are nonnegative
if \(\forall x \in R^n, x^TAx \geq 0\) then A is positive semi definite (PSD)
like it curves up
Note: \(x^TAx = \sum_{i, j} x_iA_{i, j} x_j\)
if \(\forall x \in R^n, x^TAx > 0\) then A is positive definite (PD)
PD \(\to\) full rank, invertible
PSD + symmetric \(\implies\) can be written as Gram matrix \(G = X^T X \)
if X full rank, then \(G\) is PD
PSD notation
\(S^n\) - set of symmetric matrices
\(S^n_+\) - set of PSD matrices
\(S^n_{++}\) - set of PD matrices
3.4.4.2. strang 5.2 - diagonalization#
diagonalization = eigenvalue decomposition = spectral decomposition
assume A (nxn) is symmetric
\(A = Q \Lambda Q^T\)
Q := eigenvectors as columns, Q is orthonormal
only diagonalizable if n independent eigenvectors
not related to invertibility
eigenvectors corresponding to different eigenvalues are lin. independent
other Q matrices won’t produce diagonal
there are always n complex eigenvalues
orthogonal matrix \(Q^TQ=I\)
examples
if X, Y symmetric, \(tr(YX) = tr(Y \sum \lambda_i q_i q_i^T)\)
lets us easily calculate \(A^2\), \(sqrt(A)\)
eigenvalues of \(A^2\) are squared, eigenvectors remain same
eigenvalues of \(A^{-1}\) are inverse eigenvalues
eigenvalue of rotation matrix is \(i\)
eigenvalues for \(AB\) only multiply when A and B share eigenvectors
diagonalizable matrices share the same eigenvector matrix S iff \(AB = BA\)
generalized eigenvalue decomposition - for 2 symmetric matrices
\(A = V \Lambda V^T\), \(B=VV^T\)
3.4.4.3. strang 6.3 - singular value decomposition#
SVD for any nxp matrix: \(X=U \Sigma V^T\)
U columns (nxn) are eigenvectors of \(XX^T\)
columns of V (pxp) are eigenvectors of \(X^TX\)
r singular values on diagonal of \(\Sigma\) (nxp) - square roots of nonzero eigenvalues of both \(XX^T\) and \(X^TX\)
like rotating, scaling, and rotating back
SVD ex. \(A=UDV^T \implies A^{-1} = VD^{-1} U^T\)
\(X = \sum_i \sigma_i u_i v_i^T\)
properties
for PD matrices, \(\Sigma=\Lambda\), \(U\Sigma V^T = Q \Lambda Q^T\)
for other symmetric matrices, any negative eigenvalues in \(\Lambda\) become positive in \(\Sigma\)
applications
very numerically stable because U and V are orthogonal matrices
condition number of invertible nxn matrix = \(\sigma_{max} / \sigma_{min}\)
\(A=U\Sigma V^T = u_1 \sigma_1 v_1^T + ... + u_r \sigma_r v_r^T\)
we can throw away columns corresponding to small \(\sigma_i\)
pseudoinverse \(A^+ = V \Sigma^+ U^T\)
3.4.4.4. strang 5.3 - difference eqs and power \(A^k\)#
compound interest
solving for fibonacci numbers
Markov matrices
steady-state Ax = x
corresponds to \(\lambda = 1\)
stability of \(u_{k+1} = A u_k\)
stable if all eigenvalues satisfy \(|\lambda_i|\) <1
neutrally stable if some \(|\lambda_i|=1\)
unstable if at least one \(|\lambda_i|\) > 1
Leontief’s input-output matrix
Perron-Frobenius thm - if A is a positive matrix (positive values), so is its largest eigenvalue and every component of the corresponding eigenvector is also positive
useful for ranking, etc.
power method: want to find eigenvector \(v\) corresponding to largest eigenvalue
\(v = \underset{n \to \infty}{\lim} \frac{A^n v_0}{|A^nv_0|}\) where \(v_0\) is nonnegative